Color Measurement across images of variable seeing
Colors must be measured in identical apertures in images of similar
seeing. Care must be taken when dealing with images that have
different seeing. The simplest approach begins by degrading all
images to the poorest seeing. However, much information is lost
this way. It is preferable to measure colors in the undegraded
images when possible, and then only degrade the images as much as
necessary to match the seeing of each blurry image.
This technique is illustrated below. First we demonstrate a color
measurement (r - b)
given clear images. The blue & red magnitudes
(b & r)
are measured as shown.
The technique may seem convoluted, but it
lays a solid basis for introducing images with poor seeing:
Blue magnitude =
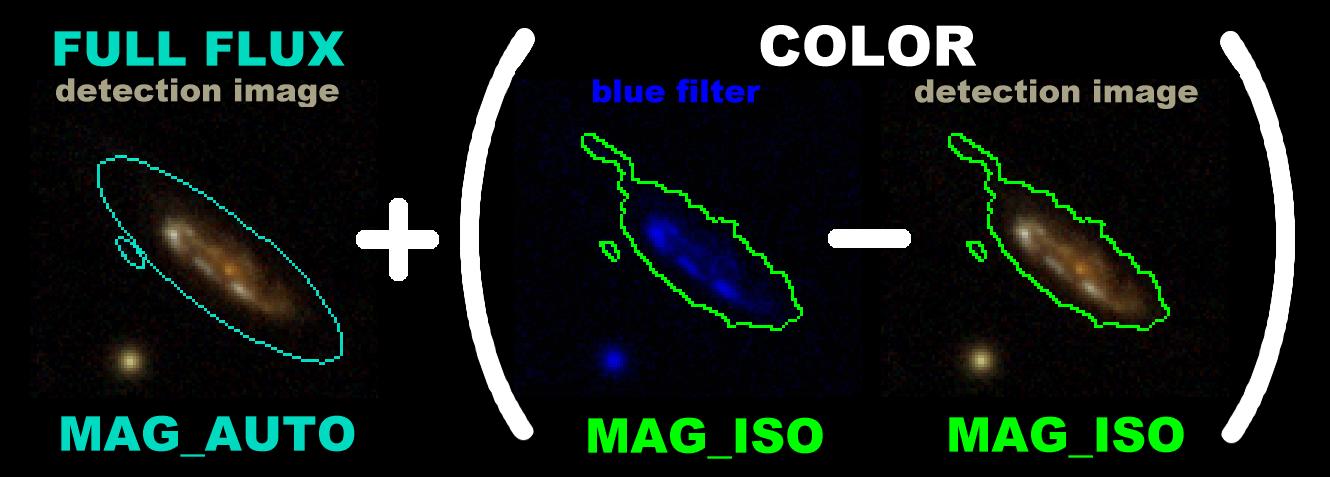
Red magnitude =
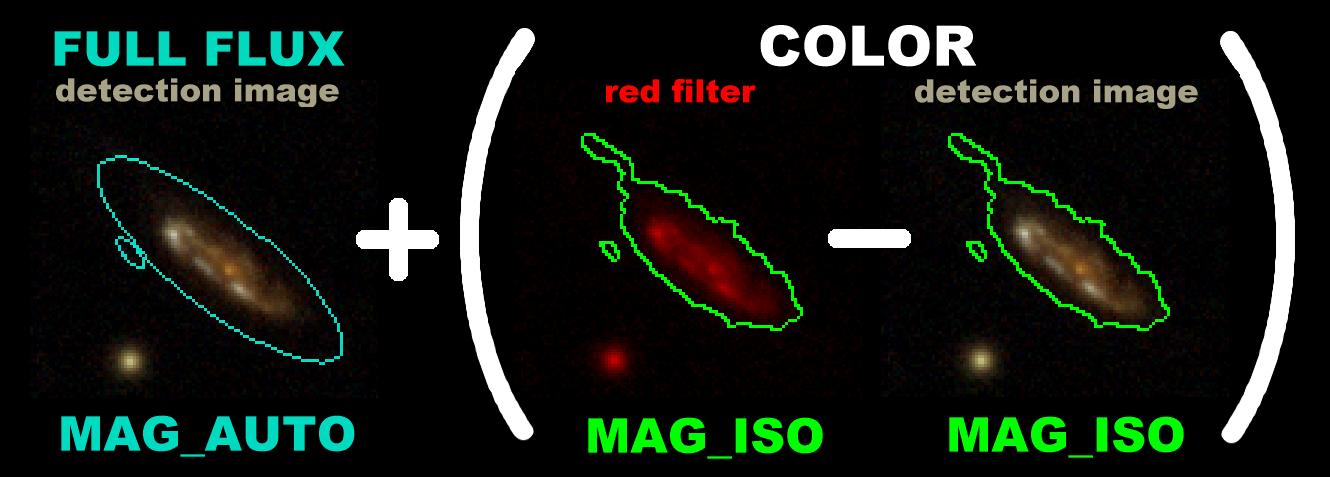
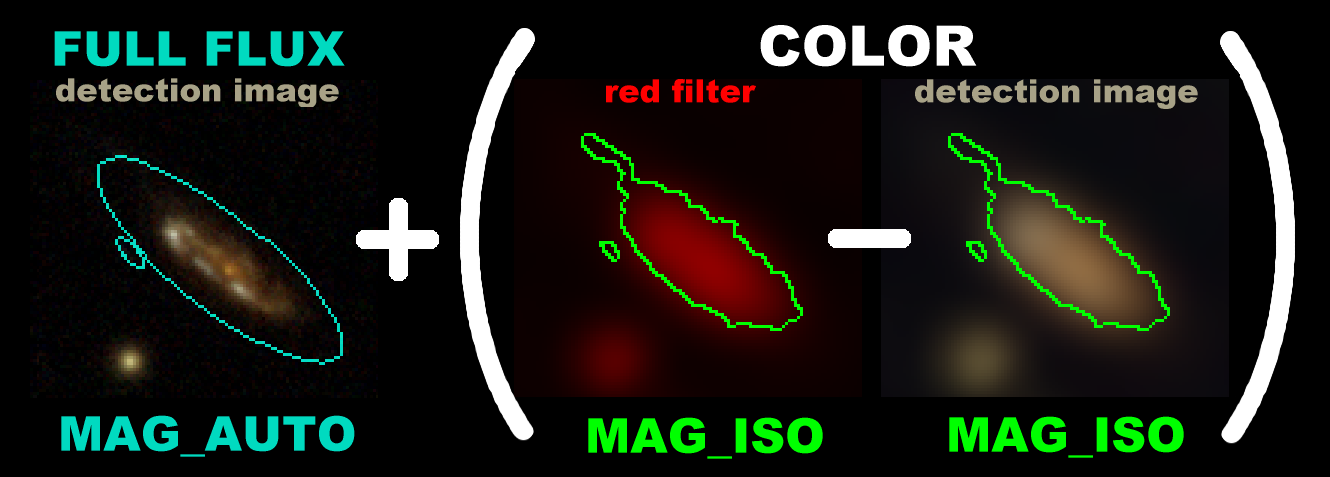
Now suppose that our red image is blurry instead. Can we still
obtain the same accurate color measurement r
- b? Yes, but we must degrade the seeing
of our detection image to match the seeing of the red image.
We measure the red color (r - d)
across these images of matched seeing.
Then we add MAG_AUTO in the detection image, yielding a total magnitude:
Red magnitude =
If you're like me, then you may worry that red flux is leaking out of the sides of the aperture.
Normally this isn't a concern, as our blurrier images are also more noisy.
The isophotal apertures in the blurry (red) image are usually smaller than those in the
crisp (blue) image.
So increasing the aperture size will only collect more noise.
But if the object is red enough
(has a large r - b decrement),
then the red isophotal aperture will be larger than the blue isophotal aperture.
In these cases we would still like to use the larger isophotal aperture.
We have a routine
sppatchnew
that compares two segment maps and adopts the larger aperture where necessary.
In this example, if we had adopted a larger apreture for our object, then our color determination would have looked like this:
Blue magnitude =
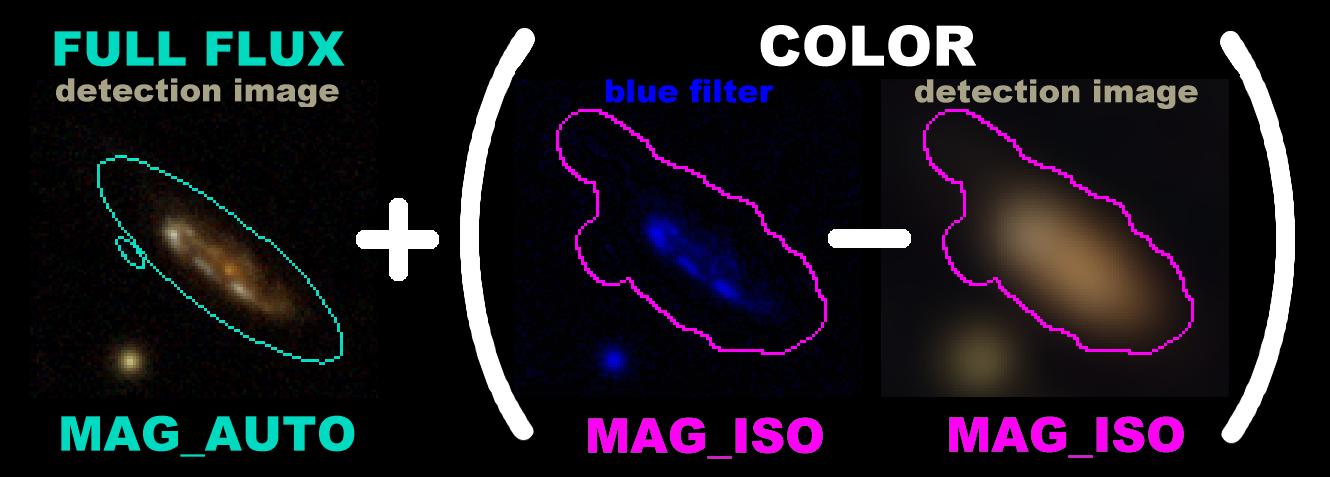
Red magnitude =
